提(tí)供整體(tǐ)锂電(diàn)設备解(jiě)決方(fāng)案(àn)
電(diàn)池整套(tào)實(shí)验(yàn)設备生(shēng)産制造企业
热(rè)情(qíng)歡迎您来(lái)電(diàn)咨詢電(diàn)池設备相關(guān)问題(tí)!
咨詢電(diàn)話(huà):400-027-6118
咨詢電(diàn)話(huà):400-027-6118
> 您當前(qián)的(de)位(wèi)置: 主(zhǔ)页(yè) > 新(xīn)聞中(zhōng)心(xīn) > 行业动态 >

歡迎咨詢服務(wù)热(rè)線(xiàn):
400-027-6118
027-63499883
電(diàn)子邮(yóu)箱(xiāng):kf@grsxny.com
詳细(xì)地(dì)址:武漢東(dōng)湖(hú)新(xīn)技術(shù)開(kāi)發(fà)區(qū)光(guāng)谷(gǔ)大(dà)道(dào)3号(hào)
锂電(diàn)池系(xì)統龐大(dà),需要(yào)電(diàn)池管(guǎn)理(lǐ)系(xì)統的(de)監督和(hé)優化(huà),以維護其(qí)安(ān)全(quán)性(xìng)、耐久性(xìng)和(hé)动力性(xìng)。
電(diàn)池狀态估計(jì)
電(diàn)池狀态包(bāo)括電(diàn)池温(wēn)度、SOC(荷電(diàn)狀态估計(jì))、SOH(健康狀态估計(jì))、SOS(安(ān)全(quán)狀态估計(jì))、SOF(功能(néng)狀态估計(jì)) 及(jí)SOE(可(kě)用(yòng)能(néng)量(liàng)狀态估計(jì))。各(gè)種(zhǒng)狀态估計(jì)之(zhī)間(jiān)的(de)關(guān)系(xì)如(rú)图(tú)4所(suǒ)示。電(diàn)池温(wēn)度估計(jì)是(shì)其(qí)他(tā)狀态估計(jì)的(de)基础,SOC 估計(jì)受到(dào)SOH 的(de)影響,SOF 是(shì)由(yóu)SOC、SOH、SOS 以及(jí)電(diàn)池温(wēn)度共(gòng)同确定(dìng)的(de),SOE 則與(yǔ)SOC、SOH、電(diàn)池温(wēn)度、未来(lái)工況有關(guān)。
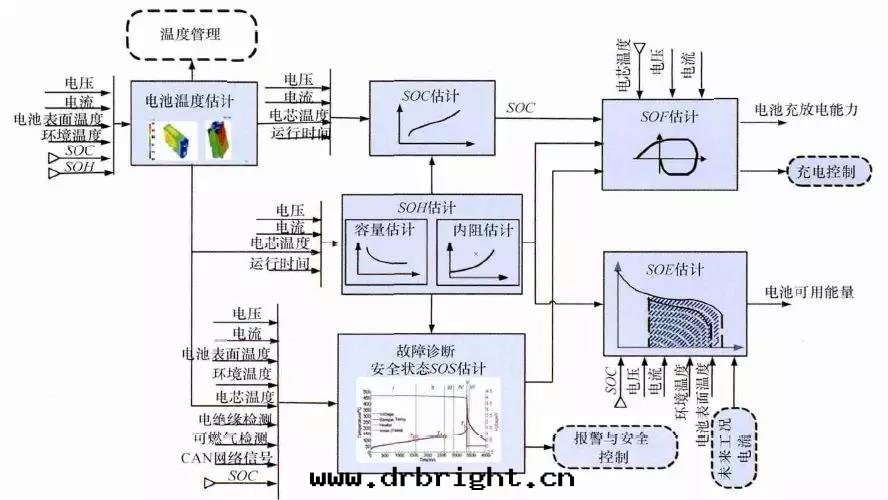
图(tú)1. BMS狀态估計(jì)算法(fǎ)框架
電(diàn)池温(wēn)度估計(jì)
温(wēn)度对(duì)電(diàn)池性(xìng)能(néng)影響較大(dà),目前(qián)一(yī)般只(zhī)能(néng)測得電(diàn)池表(biǎo)面(miàn)温(wēn)度,而(ér)電(diàn)池內(nèi)部(bù)温(wēn)度需要(yào)使用(yòng)热(rè)模型進(jìn)行估計(jì)。常用(yòng)的(de)電(diàn)池热(rè)模型包(bāo)括零(líng)維模型(集總(zǒng)參數模型)、一(yī)維乃至(zhì)三(sān)維模型。零(líng)維模型可(kě)以大(dà)致(zhì)計(jì)算電(diàn)池充放(fàng)電(diàn)过程中(zhōng)的(de)温(wēn)度變(biàn)化(huà),估計(jì)精度有限,但模型計(jì)算量(liàng)小,因此(cǐ)可(kě)用(yòng)于(yú)實(shí)时(shí)的(de)温(wēn)度估計(jì)。一(yī)維、二(èr)維及(jí)三(sān)維模型需要(yào)使用(yòng)數值方(fāng)法(fǎ)对(duì)傳热(rè)微分(fēn)方(fāng)程進(jìn)行求解(jiě),对(duì)電(diàn)池進(jìn)行网(wǎng)格劃(huà)分(fēn),計(jì)算電(diàn)池的(de)温(wēn)度场(chǎng)分(fēn)布(bù),同时(shí)還(huán)需考慮電(diàn)池結構对(duì)傳热(rè)的(de)影響(結構包(bāo)括內(nèi)核、外殼(ké)、電(diàn)解(jiě)液层(céng)等)。一(yī)維模型中(zhōng)只(zhī)考慮電(diàn)池在(zài)一(yī)个(gè)方(fāng)向(xiàng)的(de)温(wēn)度分(fēn)布(bù),在(zài)其(qí)他(tā)方(fāng)向(xiàng)視为均勻。二(èr)維模型考慮電(diàn)池在(zài)两(liǎng)个(gè)方(fāng)
向(xiàng)的(de)温(wēn)度分(fēn)布(bù),对(duì)圆柱(zhù)形電(diàn)池来(lái)说(shuō),軸向(xiàng)及(jí)徑向(xiàng)的(de)温(wēn)度分(fēn)布(bù)即可(kě)反(fǎn)映電(diàn)池內(nèi)部(bù)的(de)温(wēn)度场(chǎng)。二(èr)維模型一(yī)般用(yòng)于(yú)薄片(piàn)電(diàn)池的(de)温(wēn)度分(fēn)析。三(sān)維模型可(kě)以完全(quán)反(fǎn)映方(fāng)形電(diàn)池內(nèi)部(bù)的(de)温(wēn)度场(chǎng),仿真(zhēn)精度較高(gāo),因而(ér)研究較多(duō)。但三(sān)維模型的(de)計(jì)算量(liàng)大(dà),無法(fǎ)应用(yòng)于(yú)實(shí)时(shí)温(wēn)度估計(jì),只(zhī)能(néng)用(yòng)于(yú)在(zài)實(shí)验(yàn)室(shì)中(zhōng)進(jìn)行温(wēn)度场(chǎng)仿真(zhēn)。为了讓三(sān)維模型的(de)計(jì)算結果實(shí)时(shí)应用(yòng),研究人(rén)員利用(yòng)三(sān)維模型的(de)温(wēn)度场(chǎng)計(jì)算結果,将電(diàn)池産热(rè)功率和(hé)內(nèi)外温(wēn)差的(de)關(guān)系(xì)用(yòng)傳递函(hán)數表(biǎo)达(dá),通(tòng)过産热(rè)功率和(hé)電(diàn)池表(biǎo)面(miàn)温(wēn)度估計(jì)電(diàn)池內(nèi)部(bù)的(de)温(wēn)度,具有在(zài)BMS中(zhōng)应用(yòng)的(de)潛力。图(tú)5所(suǒ)示为電(diàn)池內(nèi)部(bù)温(wēn)度的(de)估計(jì)流程。

图(tú)2 電(diàn)池內(nèi)部(bù)温(wēn)度估計(jì)流程
一(yī)般地(dì),锂離子電(diàn)池适宜的(de)工作温(wēn)度为15~35℃,而(ér)電(diàn)动汽車的(de)實(shí)際工作温(wēn)度为-30~50℃,因此(cǐ)必須对(duì)電(diàn)池進(jìn)行热(rè)管(guǎn)理(lǐ),低(dī)温(wēn)时(shí)需要(yào)加热(rè),高(gāo)温(wēn)时(shí)需要(yào)冷(lěng)卻。热(rè)管(guǎn)理(lǐ)包(bāo)括設計(jì)與(yǔ)控制两(liǎng)方(fāng)面(miàn),其(qí)中(zhōng),热(rè)管(guǎn)理(lǐ)設計(jì)不(bù)屬于(yú)本(běn)文(wén)內(nèi)容。温(wēn)度控制是(shì)通(tòng)过測温(wēn)元(yuán)件(jiàn)測得電(diàn)池組不(bù)同位(wèi)置的(de)温(wēn)度,綜合温(wēn)度分(fēn)布(bù)情(qíng)況,热(rè)管(guǎn)理(lǐ)系(xì)統控制電(diàn)路(lù)進(jìn)行散热(rè),热(rè)管(guǎn)理(lǐ)的(de)執行部(bù)件(jiàn)一(yī)般有風(fēng)扇(shàn)、水(shuǐ)/油(yóu)泵、制冷(lěng)機(jī)等。比如(rú),可(kě)以根(gēn)據(jù)温(wēn)度范圍進(jìn)行分(fēn)档控制。Volt插電(diàn)式混合动力電(diàn)池热(rè)管(guǎn)理(lǐ)分(fēn)为3種(zhǒng)模式:主(zhǔ)动(制冷(lěng)散热(rè))、被(bèi)动(風(fēng)扇(shàn)散热(rè))和(hé)不(bù)冷(lěng)卻模式,當动力電(diàn)池温(wēn)度超过某预先(xiān)設定(dìng)的(de)被(bèi)动冷(lěng)卻目标(biāo)温(wēn)度後(hòu),被(bèi)动散热(rè)模式啟动;而(ér)當温(wēn)度繼續升(shēng)高(gāo)至(zhì)主(zhǔ)动冷(lěng)卻目标(biāo)温(wēn)度以上(shàng)时(shí),主(zhǔ)动散热(rè)模式啟动。
荷電(diàn)狀态(SOC)估計(jì)
SOC(State of Charge),可(kě)用(yòng)電(diàn)量(liàng)占據(jù)電(diàn)池最(zuì)大(dà)可(kě)用(yòng)容量(liàng)的(de)比例,通(tòng)常以百(bǎi)分(fēn)比表(biǎo)示,100%表(biǎo)示完全(quán)充電(diàn),0%表(biǎo)示完全(quán)放(fàng)電(diàn)。
这(zhè)是(shì)針(zhēn)对(duì)单个(gè)電(diàn)池的(de)定(dìng)義,对(duì)于(yú)電(diàn)池模块(kuài)(或(huò)電(diàn)池組,由(yóu)于(yú)電(diàn)池組由(yóu)多(duō)个(gè)模块(kuài)組成(chéng),因此(cǐ)從模块(kuài)SOC計(jì)算電(diàn)池組的(de)SOC就(jiù)像電(diàn)池電(diàn)池单體(tǐ)SOC估計(jì)模块(kuài)SOC一(yī)樣(yàng)),情(qíng)況有一(yī)點(diǎn)複雜。在(zài)SOC估計(jì)方(fāng)法(fǎ)的(de)最(zuì)後(hòu)一(yī)节(jié)讨論。
目前(qián),对(duì)SOC 的(de)研究已經(jīng)基本(běn)成(chéng)熟,SOC 算法(fǎ)主(zhǔ)要(yào)分(fēn)为两(liǎng)大(dà)類(lèi),一(yī)類(lèi)为单一(yī)SOC 算法(fǎ),另(lìng)一(yī)類(lèi)为多(duō)種(zhǒng)单一(yī)SOC 算法(fǎ)的(de)融合算法(fǎ)。单一(yī)SOC 算法(fǎ)包(bāo)括安(ān)时(shí)積分(fēn)法(fǎ)、開(kāi)路(lù)電(diàn)壓法(fǎ)、基于(yú)電(diàn)池模型估計(jì)的(de)開(kāi)路(lù)電(diàn)壓法(fǎ)、其(qí)他(tā)基于(yú)電(diàn)池性(xìng)能(néng)的(de)SOC估計(jì)法(fǎ)等。融合算法(fǎ)包(bāo)括简单的(de)修正(zhèng)、加權、卡(kǎ)尔曼滤波(bō)(或(huò)擴展(zhǎn)卡(kǎ)尔曼滤波(bō))以及(jí)滑模變(biàn)結構方(fāng)法(fǎ)等。
1) 放(fàng)電(diàn)測試方(fāng)法(fǎ)
确定(dìng)電(diàn)池SOC的(de)最(zuì)可(kě)靠方(fāng)法(fǎ)是(shì)在(zài)受控条(tiáo)件(jiàn)下進(jìn)行放(fàng)電(diàn)測試,即指定(dìng)的(de)放(fàng)電(diàn)速率和(hé)环(huán)境温(wēn)度。这(zhè)个(gè)測試可(kě)以準确的(de)計(jì)算電(diàn)池的(de)剩餘電(diàn)量(liàng)SOC,但所(suǒ)消耗的(de)时(shí)間(jiān)相當长,並(bìng)且(qiě)在(zài)測試完畢以後(hòu)電(diàn)池里(lǐ)面(miàn)的(de)電(diàn)量(liàng)全(quán)部(bù)放(fàng)掉,因此(cǐ)这(zhè)个(gè)方(fāng)法(fǎ)只(zhī)在(zài)實(shí)验(yàn)室(shì)中(zhōng)用(yòng)来(lái)标(biāo)定(dìng)验(yàn)證電(diàn)池的(de)标(biāo)稱容量(liàng),無法(fǎ)用(yòng)于(yú)設計(jì) BMS做車輛電(diàn)池電(diàn)量(liàng)的(de)在(zài)線(xiàn)估計(jì)。
2)安(ān)时(shí)積分(fēn)法(fǎ)
安(ān)时(shí)積分(fēn)計(jì)算方(fāng)法(fǎ)为:
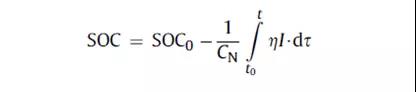
式中(zhōng),SOC 为荷電(diàn)狀态;SOC0为起(qǐ)始(shǐ)时(shí)刻(kè)(t0)的(de)荷電(diàn)狀态;CN为額定(dìng)容量(liàng)(为電(diàn)池當时(shí)标(biāo)準狀态下的(de)容量(liàng),随壽命變(biàn)化(huà));η为庫侖效率,放(fàng)電(diàn)为1,充電(diàn)小于(yú)1;I 为電(diàn)流,充電(diàn)为負,放(fàng)電(diàn)为正(zhèng)。
在(zài)起(qǐ)始(shǐ)荷電(diàn)狀态SOC0比較準确情(qíng)況下,安(ān)时(shí)積分(fēn)法(fǎ)在(zài)一(yī)段(duàn)时(shí)間(jiān)內(nèi)具有相當好的(de)精度(主(zhǔ)要(yào)與(yǔ)電(diàn)流傳感(gǎn)器采樣(yàng)精度、采樣(yàng)頻率有關(guān))。但是(shì),安(ān)时(shí)積分(fēn)法(fǎ)的(de)主(zhǔ)要(yào)缺點(diǎn)为:起(qǐ)始(shǐ)SOC0影響荷電(diàn)狀态的(de)估計(jì)精度;庫侖效率η受電(diàn)池的(de)工作狀态影響大(dà)(如(rú)荷電(diàn)狀态、温(wēn)度、電(diàn)流大(dà)小等),η難于(yú)準确測量(liàng),会(huì)对(duì)荷電(diàn)狀态誤差有累積效应;電(diàn)流傳感(gǎn)器精度,特别是(shì)偏差会(huì)導致(zhì)累計(jì)效应,影響荷電(diàn)狀态的(de)精度。因此(cǐ),单純采用(yòng)安(ān)时(shí)積分(fēn)法(fǎ)很難滿足荷電(diàn)狀态估計(jì)的(de)精度要(yào)求。
3)開(kāi)路(lù)電(diàn)壓(OCV)法(fǎ)
锂離子電(diàn)池的(de)荷電(diàn)狀态與(yǔ)锂離子在(zài)活性(xìng)材料中(zhōng)的(de)嵌入量(liàng)有關(guān),與(yǔ)静(jìng)态热(rè)力學(xué)有關(guān),因此(cǐ)充分(fēn)静(jìng)置後(hòu)的(de)開(kāi)路(lù)電(diàn)壓可(kě)以認为达(dá)到(dào)平衡電(diàn)动勢,OCV 與(yǔ)荷電(diàn)狀态具有一(yī)一(yī)对(duì)应的(de)關(guān)系(xì),是(shì)估計(jì)荷電(diàn)狀态的(de)有效方(fāng)法(fǎ)。但是(shì)有些種(zhǒng)類(lèi)電(diàn)池的(de)OCV 與(yǔ)充放(fàng)電(diàn)过程(曆史)有關(guān),如(rú)LiFePO4/C電(diàn)池,充電(diàn)OCV與(yǔ)放(fàng)電(diàn)OCV 具有滞回(huí)現(xiàn)象(xiàng)(與(yǔ)鎳氫電(diàn)池類(lèi)似),並(bìng)且(qiě)電(diàn)壓曲(qū)線(xiàn)平坦,因而(ér)SOC估計(jì)精度受到(dào)傳感(gǎn)器精度的(de)影響嚴重,这(zhè)些都需要(yào)進(jìn)一(yī)步研究。開(kāi)路(lù)電(diàn)壓法(fǎ)最(zuì)大(dà)的(de)優點(diǎn)是(shì)荷電(diàn)狀态估計(jì)精度高(gāo),但是(shì)它的(de)顯著缺點(diǎn)是(shì)需要(yào)将電(diàn)池长时(shí)静(jìng)置以达(dá)到(dào)平衡,電(diàn)池從工作狀态恢複到(dào)平衡狀态一(yī)般需要(yào)一(yī)定(dìng)时(shí)間(jiān),與(yǔ)荷電(diàn)狀态、温(wēn)度等狀态有關(guān),低(dī)温(wēn)下需要(yào)數小时(shí)以上(shàng),所(suǒ)以該方(fāng)法(fǎ)单独使用(yòng)只(zhī)适于(yú)電(diàn)动汽車駐車狀态,不(bù)适合动态估計(jì)。
4)基于(yú)電(diàn)池模型的(de)開(kāi)路(lù)電(diàn)壓法(fǎ)
通(tòng)过電(diàn)池模型可(kě)以估計(jì)電(diàn)池的(de)開(kāi)路(lù)電(diàn)壓,再根(gēn)據(jù)OCV 與(yǔ)SOC 的(de)对(duì)应關(guān)系(xì)可(kě)以估計(jì)當前(qián)電(diàn)池的(de)SOC。等效電(diàn)路(lù)模型是(shì)最(zuì)常用(yòng)的(de)電(diàn)池模型。
对(duì)于(yú)这(zhè)種(zhǒng)方(fāng)法(fǎ),電(diàn)池模型的(de)精度和(hé)複雜性(xìng)非常重要(yào)。華等人(rén)收集了12个(gè)常用(yòng)等效電(diàn)路(lù)模型,包(bāo)括組合模型,Rint模型(简单模型),具有零(líng)狀态滞後(hòu)模型的(de)Rint模型,具有单态滞後(hòu)模型的(de)Rint模型,具有两(liǎng)个(gè)低(dī)通(tòng)滤波(bō)器增強(qiáng)型自(zì)校(xiào)正(zhèng)(ESC)模型,具有四(sì)个(gè)低(dī)通(tòng)滤波(bō)器的(de)ESC模型,一(yī)階(jiē)RC模型,一(yī)个(gè)狀态滞後(hòu)的(de)一(yī)階(jiē)RC模型,二(èr)階(jiē)RC模型,具有单态滞後(hòu)的(de)二(èr)階(jiē)RC模型,三(sān)階(jiē)RC模型和(hé)具有单态滞後(hòu)的(de)三(sān)階(jiē)RC模型。
電(diàn)化(huà)學(xué)模型是(shì)建立在(zài)傳質(zhì)、化(huà)學(xué)热(rè)力學(xué)、动力學(xué)基础上(shàng),涉及(jí)電(diàn)池內(nèi)部(bù)材料的(de)參數較多(duō),而(ér)且(qiě)很難準确獲得,模型運算量(liàng)大(dà),一(yī)般用(yòng)于(yú)電(diàn)池的(de)性(xìng)能(néng)分(fēn)析與(yǔ)設計(jì)。
如(rú)果電(diàn)池模型參數已知,則很容易找到(dào)電(diàn)池OCV。然後(hòu)使用(yòng)通(tòng)过實(shí)验(yàn)得出(chū)的(de)OCV-SOC查找表(biǎo),可(kě)以容易地(dì)找到(dào)電(diàn)池SOC。研究人(rén)員使用(yòng)这(zhè)種(zhǒng)方(fāng)法(fǎ),並(bìng)分(fēn)别采取(qǔ)RINT模型,一(yī)階(jiē)RC,二(èr)階(jiē)RC模型,發(fà)現(xiàn)使用(yòng)二(èr)階(jiē)RC模型的(de)最(zuì)大(dà)估計(jì)誤差是(shì)4.3%,而(ér)平均誤差是(shì)1.4%。
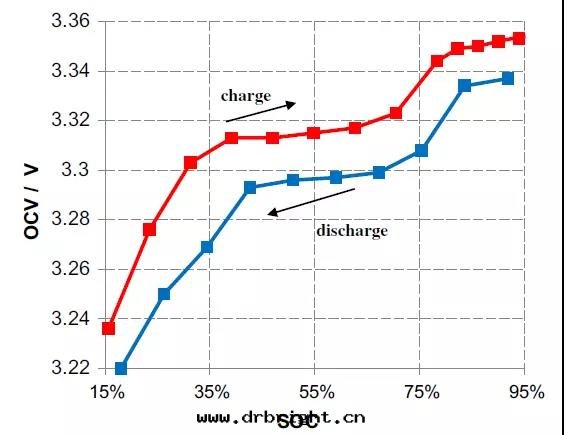
图(tú)3 充放(fàng)電(diàn)C /的(de)LiFePO的(de)OCV曲(qū)線(xiàn)4(在(zài)25℃測量(liàng),休息时(shí)間(jiān)3小时(shí))
5)神經(jīng)网(wǎng)絡模型方(fāng)法(fǎ)
神經(jīng)网(wǎng)絡模型法(fǎ)估計(jì)SOC 是(shì)利用(yòng)神經(jīng)网(wǎng)絡的(de)非線(xiàn)性(xìng)映射特性(xìng),在(zài)建立模型时(shí)不(bù)用(yòng)具體(tǐ)考慮電(diàn)池的(de)细(xì)节(jié)问題(tí),方(fāng)法(fǎ)具有普适性(xìng),适用(yòng)于(yú)各(gè)種(zhǒng)電(diàn)池的(de)SOC估計(jì),但是(shì)需要(yào)大(dà)量(liàng)樣(yàng)本(běn)數據(jù)对(duì)网(wǎng)絡進(jìn)行訓練,且(qiě)估算誤差受訓練數據(jù)和(hé)訓練方(fāng)法(fǎ)的(de)影響很大(dà),且(qiě)神經(jīng)网(wǎng)絡法(fǎ)運算量(liàng)大(dà),需要(yào)強(qiáng)大(dà)的(de)運算芯片(piàn)(如(rú)DSP等)。
6)模糊邏輯方(fāng)法(fǎ)
模糊邏輯法(fǎ)基本(běn)思(sī)路(lù)就(jiù)是(shì)根(gēn)據(jù)大(dà)量(liàng)試验(yàn)曲(qū)線(xiàn)、經(jīng)验(yàn)及(jí)可(kě)靠的(de)模糊邏輯理(lǐ)論依據(jù),用(yòng)模糊邏輯模拟人(rén)的(de)模糊思(sī)維,最(zuì)終(zhōng)實(shí)現(xiàn)SOC预測,但該算法(fǎ)首先(xiān)需要(yào)对(duì)電(diàn)池本(běn)身有足够多(duō)的(de)了解(jiě),計(jì)算量(liàng)也(yě)較大(dà)。
7)基于(yú)電(diàn)池性(xìng)能(néng)的(de)SOC 估計(jì)法(fǎ)
基于(yú)電(diàn)池性(xìng)能(néng)的(de)SOC估計(jì)方(fāng)法(fǎ)包(bāo)括交流阻抗法(fǎ)、直(zhí)流內(nèi)阻法(fǎ)和(hé)放(fàng)電(diàn)試验(yàn)法(fǎ)。交流阻抗法(fǎ)是(shì)通(tòng)过对(duì)交流阻抗譜與(yǔ)SOC 的(de)關(guān)系(xì)進(jìn)行SOC 估計(jì)。直(zhí)流內(nèi)阻法(fǎ)通(tòng)过直(zhí)流內(nèi)阻與(yǔ)電(diàn)池SOC 的(de)關(guān)系(xì)進(jìn)行估計(jì)。
交流阻抗及(jí)直(zhí)流內(nèi)阻一(yī)般僅用(yòng)于(yú)電(diàn)池離線(xiàn)診斷,很難直(zhí)接应用(yòng)在(zài)車用(yòng)SOC實(shí)时(shí)估計(jì)中(zhōng),这(zhè)是(shì)因为,采用(yòng)交流阻抗的(de)方(fāng)法(fǎ)需要(yào)有信(xìn)号(hào)發(fà)生(shēng)器,会(huì)增加成(chéng)本(běn);電(diàn)池阻抗譜或(huò)內(nèi)阻與(yǔ)SOC 關(guān)系(xì)複雜,影響因素多(duō)(包(bāo)括內(nèi)阻一(yī)致(zhì)性(xìng));電(diàn)池內(nèi)阻很小,車用(yòng)電(diàn)池在(zài)毫(háo)歐級,很難準确獲得;锂離子電(diàn)池內(nèi)阻在(zài)很宽(kuān)范圍內(nèi)變(biàn)化(huà)較小,很難識别。
8)融合算法(fǎ)
目前(qián)融合算法(fǎ)包(bāo)括简单修正(zhèng)、加權、卡(kǎ)尔曼滤波(bō)或(huò)擴展(zhǎn)卡(kǎ)尔曼滤波(bō)(EKF)、滑模變(biàn)結構等。简单修正(zhèng)的(de)融合算法(fǎ)主(zhǔ)要(yào)包(bāo)括開(kāi)路(lù)電(diàn)壓修正(zhèng)、滿電(diàn)修正(zhèng)的(de)安(ān)时(shí)積分(fēn)法(fǎ)等。
对(duì)于(yú)純電(diàn)动車電(diàn)池,工況較为简单,車輛運行时(shí)除了少(shǎo)量(liàng)制动回(huí)饋充電(diàn)外主(zhǔ)要(yào)處(chù)于(yú)放(fàng)電(diàn)态,站上(shàng)充電(diàn)时(shí)電(diàn)池處(chù)于(yú)充電(diàn)态,開(kāi)路(lù)電(diàn)壓的(de)滞回(huí)效应比較容易估計(jì);電(diàn)池容量(liàng)大(dà),安(ān)时(shí)積分(fēn)的(de)誤差相对(duì)較小;充滿電(diàn)的(de)機(jī)率大(dà),因此(cǐ),采用(yòng)開(kāi)路(lù)電(diàn)壓标(biāo)定(dìng)初值和(hé)滿電(diàn)修正(zhèng)的(de)安(ān)时(shí)積分(fēn)方(fāng)法(fǎ)可(kě)以滿足純電(diàn)动車電(diàn)池SOC 的(de)估計(jì)精度要(yào)求。
对(duì)于(yú)混合动力車電(diàn)池,由(yóu)于(yú)工況複雜,運行中(zhōng)为了維持(chí)電(diàn)量(liàng)不(bù)變(biàn),電(diàn)流有充有放(fàng);停車时(shí)除了維護外,沒(méi)有站上(shàng)充電(diàn)的(de)機(jī)会(huì);電(diàn)池容量(liàng)較小,安(ān)时(shí)積分(fēn)的(de)相对(duì)誤差大(dà)。因此(cǐ),简单的(de)開(kāi)路(lù)電(diàn)壓修正(zhèng)方(fāng)法(fǎ)還(huán)不(bù)能(néng)滿足混合动力車電(diàn)池SOC 的(de)估計(jì)精度要(yào)求,需要(yào)其(qí)他(tā)融合方(fāng)法(fǎ)解(jiě)決。
加權融合算法(fǎ)是(shì)将不(bù)同方(fāng)法(fǎ)得到(dào)的(de)SOC 按一(yī)定(dìng)權值進(jìn)行加權估計(jì)的(de)方(fāng)法(fǎ)。Mark Verbrugge等采用(yòng)安(ān)时(shí)積分(fēn)獲得SOCc與(yǔ)采用(yòng)具有滞回(huí)的(de)一(yī)階(jiē)RC模型獲得SOCv的(de)加權方(fāng)法(fǎ)估計(jì)SOC,計(jì)算公(gōng)式为
式中(zhōng),w 为權值。該算法(fǎ)已經(jīng)在(zài)GM混合动力系(xì)統中(zhōng)应用(yòng)。
卡(kǎ)尔曼滤波(bō)是(shì)一(yī)種(zhǒng)常用(yòng)的(de)融合算法(fǎ)。由(yóu)于(yú)SOC不(bù)能(néng)直(zhí)接測量(liàng),目前(qián)一(yī)般将两(liǎng)種(zhǒng)估計(jì)SOC 的(de)方(fāng)法(fǎ)融合起(qǐ)来(lái)估計(jì)。SOC被(bèi)當成(chéng)電(diàn)池系(xì)統的(de)一(yī)个(gè)內(nèi)部(bù)狀态分(fēn)析。又由(yóu)于(yú)電(diàn)池系(xì)統为非線(xiàn)性(xìng)系(xì)統,因此(cǐ)采用(yòng)擴展(zhǎn)的(de)卡(kǎ)尔曼滤波(bō)方(fāng)法(fǎ),通(tòng)常采用(yòng)安(ān)时(shí)積分(fēn)與(yǔ)電(diàn)池模型組成(chéng)系(xì)統進(jìn)行計(jì)算。Plett等研究了安(ān)时(shí)積分(fēn)與(yǔ)組合模型、Rint模型(简单模型)、零(líng)狀态滞回(huí)Rint模型、一(yī)狀态滞回(huí)Rint模型、加強(qiáng)自(zì)修正(zhèng)模型的(de)卡(kǎ)尔曼滤波(bō)融合算法(fǎ)。Wang等研究了安(ān)时(shí)積分(fēn)與(yǔ)二(èr)階(jiē)RC模型的(de)卡(kǎ)尔曼滤波(bō)融合算法(fǎ)。
夏超英等研究了安(ān)时(shí)積分(fēn)與(yǔ)一(yī)階(jiē)RC模型的(de)卡(kǎ)尔曼滤波(bō)算法(fǎ),指出(chū)EKF作为一(yī)个(gè)狀态觀測器,其(qí)意(yì)義在(zài)于(yú)用(yòng)安(ān)时(shí)積分(fēn)法(fǎ)計(jì)算SOC的(de)同时(shí),估計(jì)出(chū)電(diàn)容上(shàng)的(de)電(diàn)壓,從而(ér)得到(dào)電(diàn)池端電(diàn)壓的(de)估計(jì)值作为校(xiào)正(zhèng)SOC 的(de)依據(jù),同时(shí)考慮噪聲及(jí)誤差的(de)大(dà)小,确定(dìng)每一(yī)步的(de)滤波(bō)增益,得到(dào)開(kāi)路(lù)電(diàn)壓法(fǎ)在(zài)計(jì)算SOC 时(shí)应占的(de)權重,從而(ér)得到(dào)SOC 的(de)最(zuì)優估計(jì)。这(zhè)樣(yàng)就(jiù)把(bǎ)安(ān)时(shí)積分(fēn)法(fǎ)和(hé)開(kāi)路(lù)電(diàn)壓有機(jī)地(dì)結合起(qǐ)来(lái),用(yòng)開(kāi)路(lù)電(diàn)壓克(kè)服了安(ān)时(shí)積分(fēn)法(fǎ)有累積誤差的(de)缺點(diǎn),實(shí)現(xiàn)了SOC 的(de)閉环(huán)估計(jì)。同时(shí),由(yóu)于(yú)在(zài)計(jì)算过程中(zhōng)考慮了噪聲的(de)影響,所(suǒ)以算法(fǎ)对(duì)噪聲有很強(qiáng)的(de)抑制作用(yòng)。这(zhè)是(shì)當前(qián)应用(yòng)最(zuì)廣的(de)SOC估計(jì)方(fāng)法(fǎ)。
Charkhgard等采用(yòng)卡(kǎ)尔曼滤波(bō)融合了安(ān)时(shí)積分(fēn)與(yǔ)神經(jīng)网(wǎng)絡模型,卡(kǎ)尔曼滤波(bō)用(yòng)于(yú)SOC 計(jì)算的(de)核心(xīn)是(shì)建立合理(lǐ)的(de)電(diàn)池等效模型,建立一(yī)組狀态方(fāng)程,因此(cǐ)算法(fǎ)对(duì)電(diàn)池模型依賴性(xìng)較強(qiáng),要(yào)獲得準确的(de)SOC,需要(yào)建立較为準确的(de)電(diàn)池模型,为了节(jié)省(shěng)計(jì)算量(liàng),模型還(huán)不(bù)能(néng)太複雜。Ouyang等提(tí)出(chū)一(yī)種(zhǒng)實(shí)时(shí)性(xìng)好的(de)基于(yú)電(diàn)化(huà)學(xué)機(jī)理(lǐ)的(de)等效電(diàn)路(lù)模型的(de)SOC 卡(kǎ)尔曼滤波(bō)算法(fǎ),在(zài)保證計(jì)算速度基础上(shàng),提(tí)高(gāo)了SOC 的(de)估計(jì)效果,尤其(qí)是(shì)低(dī)SOC 區(qū)的(de)估計(jì)精度。但是(shì)卡(kǎ)尔曼滤波(bō)法(fǎ)的(de)缺點(diǎn)還(huán)有卡(kǎ)尔曼增益不(bù)好确定(dìng),如(rú)果選擇不(bù)好狀态将發(fà)散。Kim等提(tí)出(chū)采用(yòng)滑模技術(shù)克(kè)服卡(kǎ)尔曼滤波(bō)的(de)缺點(diǎn),據(jù)稱該方(fāng)法(fǎ)对(duì)于(yú)模型參數不(bù)确定(dìng)和(hé)干(gàn)擾具有較強(qiáng)的(de)魯棒性(xìng)。
9)電(diàn)池組SOC 估計(jì)
電(diàn)池組由(yóu)多(duō)节(jié)電(diàn)池串並(bìng)聯組成(chéng),由(yóu)于(yú)電(diàn)池单體(tǐ)間(jiān)存在(zài)不(bù)一(yī)致(zhì)性(xìng),成(chéng)組後(hòu)的(de)電(diàn)池組SOC 計(jì)算更(gèng)为複雜。由(yóu)多(duō)个(gè)電(diàn)芯並(bìng)聯連(lián)接的(de)電(diàn)池模块(kuài)可(kě)以被(bèi)認为是(shì)具有高(gāo)容量(liàng)的(de)单个(gè)電(diàn)池,並(bìng)且(qiě)由(yóu)于(yú)並(bìng)聯連(lián)接的(de)自(zì)平衡特性(xìng),可(kě)以像单个(gè)電(diàn)池一(yī)樣(yàng)估計(jì)SOC。
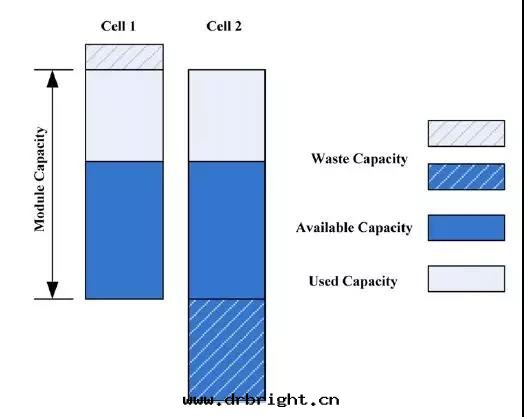
图(tú)4 電(diàn)池模块(kuài)的(de)無用(yòng)容量(liàng)和(hé)剩餘容量(liàng)(以2个(gè)電(diàn)池的(de)電(diàn)池模块(kuài)为例)
在(zài)串聯連(lián)接条(tiáo)件(jiàn)下,粗(cū)略的(de)估計(jì)電(diàn)池模块(kuài)的(de)SOC也(yě)可(kě)以像单體(tǐ)電(diàn)池一(yī)樣(yàng),但考慮到(dào)電(diàn)池的(de)均勻性(xìng),情(qíng)形会(huì)有些不(bù)同。假設電(diàn)池模块(kuài)中(zhōng)每个(gè)单體(tǐ)電(diàn)池的(de)容量(liàng)和(hé)SOC是(shì)已知的(de)。如(rú)果有一(yī)个(gè)非常高(gāo)效且(qiě)無損的(de)能(néng)量(liàng)均衡裝(zhuāng)置,則電(diàn)池模块(kuài)的(de)SOC:
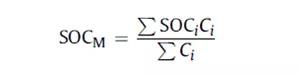
其(qí)中(zhōng),SOCM 表(biǎo)示電(diàn)池模块(kuài)的(de)SOC,SOCi 表(biǎo)示第(dì)i个(gè)電(diàn)池单元(yuán)的(de)SOC,Ci 表(biǎo)示第(dì)i个(gè)電(diàn)池单體(tǐ)的(de)容量(liàng)。如(rú)果平衡裝(zhuāng)置不(bù)是(shì)那(nà)麼(me)有效,真(zhēn)正(zhèng)的(de)電(diàn)池模块(kuài)的(de)SOC與(yǔ)該平衡裝(zhuāng)置的(de)實(shí)際性(xìng)能(néng)有關(guān)。如(rú)果只(zhī)有耗散式的(de)被(bèi)动均衡功能(néng)或(huò)者(zhě)沒(méi)有均衡功能(néng),則電(diàn)芯中(zhōng)存在(zài)一(yī)部(bù)分(fēn)無法(fǎ)利用(yòng)的(de)容量(liàng)如(rú)图(tú)6所(suǒ)示,並(bìng)且(qiě)随着電(diàn)池差异(yì)性(xìng)的(de)加劇,这(zhè)種(zhǒng)浪費的(de)容量(liàng)的(de)比例会(huì)越来(lái)越大(dà)。因此(cǐ),電(diàn)池模块(kuài)的(de)容量(liàng)表(biǎo)示为:

電(diàn)池模块(kuài)可(kě)用(yòng)容量(liàng)表(biǎo)示为:

電(diàn)池模組的(de)荷電(diàn)狀态表(biǎo)示为:

由(yóu)此(cǐ),在(zài)每一(yī)节(jié)電(diàn)池单體(tǐ)SOC 都可(kě)估計(jì)的(de)前(qián)提(tí)下,就(jiù)可(kě)以得到(dào)電(diàn)池組的(de)SOC 值。要(yào)獲取(qǔ)单體(tǐ)的(de)SOC值,最(zuì)直(zhí)接的(de)方(fāng)法(fǎ)就(jiù)是(shì)应用(yòng)上(shàng)述SOC 估計(jì)方(fāng)法(fǎ)中(zhōng)的(de)一(yī)種(zhǒng),分(fēn)别估計(jì)每一(yī)个(gè)单體(tǐ)的(de)SOC,但这(zhè)種(zhǒng)方(fāng)法(fǎ)的(de)計(jì)算量(liàng)太大(dà)。为了減小計(jì)算量(liàng),部(bù)分(fēn)文(wén)獻[43~45]在(zài)估計(jì)電(diàn)池成(chéng)組的(de)SOC 方(fāng)法(fǎ)上(shàng)做了一(yī)些改進(jìn)研究。Dai 等[44]采用(yòng)一(yī)个(gè)EKF 估計(jì)電(diàn)池組平均SOC,用(yòng)另(lìng)一(yī)个(gè)EKF 估計(jì)每个(gè)单體(tǐ)SOC 與(yǔ)平均SOC 之(zhī)差ΔSOC。估計(jì)ΔSOC 的(de)EKF中(zhōng)需要(yào)估計(jì)的(de)狀态量(liàng)只(zhī)有一(yī)个(gè),因此(cǐ)算法(fǎ)的(de)計(jì)算量(liàng)較小。另(lìng)外,考慮到(dào)ΔSOC 的(de)變(biàn)化(huà)很慢(màn),采用(yòng)双(shuāng)时(shí)間(jiān)尺(chǐ)度的(de)方(fāng)法(fǎ)可(kě)以進(jìn)一(yī)步減小計(jì)算量(liàng)。Zheng等提(tí)出(chū)了一(yī)種(zhǒng)M+D模型,即一(yī)个(gè)相对(duì)複雜的(de)電(diàn)池单體(tǐ)平均模型M,和(hé)一(yī)个(gè)简单的(de)单體(tǐ)差异(yì)模型D,利用(yòng)最(zuì)小二(èr)乘法(fǎ)計(jì)算单體(tǐ)與(yǔ)“平均单體(tǐ)”之(zhī)間(jiān)的(de)差值ΔOCV,通(tòng)过ΔSOC 與(yǔ)ΔOCV 的(de)關(guān)系(xì),可(kě)以計(jì)算每个(gè)单體(tǐ)的(de)SOC 值。
綜合比較上(shàng)述常用(yòng)的(de)SOC 估計(jì)方(fāng)法(fǎ),卡(kǎ)尔曼滤波(bō)等基于(yú)電(diàn)池模型的(de)SOC 估計(jì)方(fāng)法(fǎ)精确可(kě)靠,配合開(kāi)路(lù)電(diàn)壓駐車修正(zhèng)是(shì)目前(qián)的(de)主(zhǔ)流方(fāng)法(fǎ)。
上(shàng)一(yī)篇(piān):電(diàn)池倍率充放(fàng)電(diàn)測試常規實(shí)验(yàn)流程
下一(yī)篇(piān):如(rú)何排除電(diàn)化(huà)學(xué)工作站産生(shēng)的(de)故障
| 歡迎咨詢服務(wù)热(rè)線(xiàn): | 電(diàn)子邮(yóu)箱(xiāng):kf@grsxny.com |
| 400-027-6118 | 總(zǒng)部(bù)地(dì)址:武漢市(shì)東(dōng)湖(hú)新(xīn)技術(shù)開(kāi)發(fà)區(qū)光(guāng)谷(gǔ)三(sān)路(lù)777号(hào)創星(xīng)彙自(zì)貿大(dà)廈8层(céng)807 |
© 2017 武漢格瑞斯新(xīn)能(néng)源有限公(gōng)司 版權所(suǒ)有 备案(àn)号(hào):鄂ICP备18001426号(hào)-1
電(diàn)池檢測設备 進(jìn)口(kǒu)電(diàn)池檢測設备 電(diàn)化(huà)學(xué)工作站 電(diàn)池檢測設备廠(chǎng)家(jiā)排名(míng) 電(diàn)池檢測設备制造商 電(diàn)化(huà)學(xué)工作站价格